
教/業師:李建模、林坤佑、陳士元、陳君朋、陳和麟、張時中、莊哲明、鍾孝文、盧奕璋、蘇柏青、蘇國棟
大助教:陳界宇、許瑞福
隨班助教:呂英弘、宋馨慈、周奕慧、俞建琁、趙少緯、蔡昀哲、鄧笙敔、謝兆和、鐘民憲
(以上為本文合著者,依筆畫順序排列。)
壹、前言
延續106學年度開始,本系上學期開授「創意電資工程入門教育設計」,限制大三以上學生 (包含研究所) 選修;目標在於每年度精進教案設計並檢驗課程安排,同時培養未來擔任課程助教人才。下學期開授「電資工程入門設計與實作」,修課同學限制在大一電機系學生,隨班課程助教大部分皆由上學期修課同學擔任;由於助教年紀與大一學生接近,因此在問題回饋與實作協助,都更清楚大一學生所遇到的困難。
由於本課程在電機系的支持,諸多授課老師、隨班助教、修課學生的共同努力,「電資工程入門設計與實作」在大一新生有一定的知名度。每學期第一次上課確定修課人數時,會有超過修課人數的一半以上,排隊抽籤希望能獲得極少數的加簽機會;甚至有同學自願參與所有課程要求,即使最後沒學分也要整學期旁聽的特殊情況。
為保持教學品質與修課同學權益,在現有師資人數上,每學期只能負擔三個班級。班級統一教材、教學進度與評分標準,並有共通的教師與助教團隊,教師團隊幾乎每週固定舉辦「教學會議」。在109學年度第二學期 (109-2) 的課程,分別安排於週一、週三上午 9:10~12:10,週三下午 15:30 ~ 18:30,每班修課人數24人,並開放最多3人旁聽,學期結束共有 72 人修課5人旁聽。
本學期有兩位博士班學生擔任大助教,協助師生與小助教的所有溝通協調,並且每班配有3位隨班小助教。開放實驗室 ( Open Lab.) 固定安排為每週三18:30~21:30、週六9:10~12:10,配置1~2位助教協助學生解決問題,並在評量週前增加時段。教師授課與 Open Lab. 地點,皆為臺大電機系明達館402教室,教室內有6張可供6人使用的大桌,另有約6 x 3平方公尺的空曠地面,提供學生在開放空間測試車輛行走,並在指定題競賽階段鋪上迷宮地圖。
本學期課程規劃如表一,具體的成績評量:
- 出席率+實驗操作:30%
- 若未事前請假,超過20分鐘未在課堂上(無論遲到或早退),即視為無故缺課 (不可抗拒因素除外)
- 無故缺課一次,扣學期總成績5分
- 無故缺課達三次,學期成績為F
- 作業、工作記錄:20%
- 指定專題分組展示、報告:30%
- 自選專題分組展示、報告:20%
前三週課程分組由授課教授安排,第四週學生自行分組確定後,如同108-2 學期要求撰寫工作記錄簿,並統一在 HackMD 平台撰寫與批改,師生與助教可以有效率地進行回饋。記錄內容包含一些固定問題,例如當週進度、組內討論事項、課程改善意見、修課心得等。而各班助教與教授,會輪流針對撰寫內容給予回饋,批改後列入平時成績,即使是旁聽生也給予同樣的要求。
貳、本學期課程規劃與進行方式
現行課程安排如圖一,有明確的三階段區分,每階段都有其任務,顏色與課程規畫表一對應。在模仿導向學習 (Imitation-based Learning, IBL) 階段,重點在於教導學生具備基本知識,著重在「知其然而不知其所以然」,使大一學生藉由上學期計算機程式、交換電路與邏輯設計,這兩門課所教導的基礎知識,迅速掌握微控制器電路板 Arduino Uno 與相關模組的使用、以及 Arduino 的C程式語言撰寫能力。同學修這門課同時,大一下必修課還包含電路學、第二學期的普通物理學與微積分 (包含向量微積分),更能了解電機系其他必修課的安排,對於所學有更深入的了解。
車輛行駛迷宮如何走最小路徑,這看似簡單的問題卻與 Breadth-First Search (BFS) 演算法有關。前兩週 Arduino 實作課結束後 (偏向動手),第三週切換到演算法設計與介紹 (偏向動腦)。相較於其他 Arduino 教學與車輛循跡課程,本課程最大不同之處,在於演算法單元的加入,也是展現電機系軟硬體系統整合的具體例證。同學們學會使用 Arduino,也懂得BFS演算法設計;第四週課前,讓同學自行確認組員並合作組裝車輛。由於在過去三週的授課教授,會刻意讓不同學生坐在一起合作,增加同班級同學認識彼此的機會,也較能找到與自己相處融洽的同學。
本系列課程是一循環課程,上學期讓大三以上同學參加修改教案,下學期就用這教案帶領大一學生。過去四年,每一個上學期都改進車輛的設計,因此目前車輛設計已經進入第四版。有別於市面上可買到的 Arduino 車輛,現在系上學生自行設計的車輛,更適合在迷宮中行走,同時也考慮期末自選題的擴充性。許多學生上大學前對螺絲起子、螺帽、烙鐵焊接等並不熟悉,這些工具的使用都在本週教授,並安排助教指導學生使用 (又回到動手較多的課程)。
在前四週的課程結束後,每一組學生已有組裝好的車子,知道怎麼寫類似C語言的程式,透過程式控制車子前進、後退、左右轉。然而,要怎麼透過紅外線感測元件,讓車子平穩的在黑線上走動,在適當的地方左右轉、迴轉,則需要了解比例積分微分控制(Proportional-Integral and Derivative Control, PID Control)原理。紅外線裝置藉由地面的色差,決定車子要如何行走,而行走時是否仍在線上或偏離,也直接影響紅外線裝置感應的結果。這一個回授的架構,希望帶給學生控制的概念,也是第五週所著重的目標。
綜合過去五週的課程內容,學生的車子已經會沿著黑線行走,第六週將宣布課程「指定題」的內容:「迷宮尋寶車」。這個尋寶車有三大特色:
- 自走車 (自己走不用遙控,雖然同學知道怎麼透過藍牙遙控)
- 走地圖 (能夠在佈滿黑線迷宮,不同標示的地圖上行走)
- 找寶藏 (讀取RFID Tag)
目標是任意給定地圖、與不同的 RFID Tag 所在位置,每組學生必須設計自走車,在有限時間內,以最短路徑找到最多寶藏。
此外,第六週課程也統整過去五週課程,介紹整輛車子的模組規格與架構,建立學生「系統」的概念並考慮整體功率消耗。同時也預告地圖基本架構與樣貌、小型E字地圖、第十一週 Check Point 地圖;使同學們知道怎麼樣讓自己的車子,一步一步從基本黑線循跡、識別特殊方塊行走E字地圖、到最後面對指定題的大地圖。而進入第七週問題導向學習 (Problem-based Learning, PmBL) 階段之前,第六週課程最後會介紹甘特圖 (Gantt Chart) 與資料介面流程;前者協助同學規劃未來幾週進度,後者協助同學在Python與Arduino 使用的C語言,彼此協力讓車子完成自走尋寶。學生基於過去六週所具備的能力,去解決指定題所達成的要求;也就是利用現有知識「面對問題 (Problem) 」,透過團隊合作找到「解決方案 (Solutions)」。
課程安排基於「問題導向學習」的理念,各班各組所面對的題目與準備時間都一樣,解決此問題的方法,需要各組同學分工撰寫程式、整合車子系統。每組車輛穩定性不同,同組同學需彼此合作測試並解決問題。此階段教師沒有上台講課,但教師每週與助教都會帶學生課堂討論,每組同學上台報告工作現況、遇到各種問題、是否解決此問題等。藉由分享問題與如何解決問題,同學們彼此互相學習;同時也形成一種特殊的跨組討論方式,例如各組同樣處理循跡問題的同學、同樣設計演算法路徑的同學彼此跨組討論。老師與助教扮演從旁協助的腳色,並將過去的經驗提供作參考,減少解決問題或因探索所花的時間;當然對於極少數較不認真的同學,也提供輔導與提醒。
而本學期在指定題檢驗前,109-1同學 (也是本學期助教) 新設計了一個檢查點 (Check point)。整個 Check point 地圖就像是考駕駛執照的教練場,有S型、倒車入庫、直線加速…等路線設計,如同現實生活中,人們要能安全駕駛車輛上路前,需要能通過駕照考試的要求。藉由這樣的測試,讓學生提前知道自己的程式,在地圖上跑起來的結果如何,提前發現問題解決問題。有別於上學年,今年指定題只有一題且設定在第十二週。題目仍是個很大的迷宮,必須在有限時間內盡可能讀取分數,並設定RFID Tag為得分寶藏,距離迷宮入口越近的分數越低,離入口越遠的分數越高。每組同學依自己車輛現況,策略性的安排進入迷宮後,是先取得附近的分數,或直接取得最遠的分數。
去年指定題地圖公布後,不少學生看了地圖的起點,人為判斷車子的走向,讓車子可以順利的在地圖上行走,雖然這樣有機會獲得高分,但失去教導演算法課程的意義。因此本學期的做法,是事先對學生公布助教會檢查程式,規定須使用演算法的程式,而不能將地圖寫死在程式內。而蘇柏青老師在老師們每週的例會後,寄了一封信提供不同的想法:
『…我們在課程裡規劃了「指定題」,也許不應該有「指定法」,或者至少應儘量避免指定法的要求。我們設計了以競賽形式的「題」以及其遊戲規則,也在學期的前半段教了他們「參考法」,讓學生們可以按照規則,參考課堂上教的方法,進一步發揮他們的創意修改工程設計以力求高分。
這些工程設計,從最底層的機械、電子、一直到各階層的硬體、軟體,都是可以發揮創意的地方。但唯獨這個「決定車車路徑的方法」,我們「指定」了要用 BFS演算法來作。我覺得有可能反而壓抑了同學們創新的機會。…』
幾位老師與助教,都覺得蘇老師提出的建議很有道理,也是110-1 學期開設的:「創意電資工程入門教育設計」會列入的的課程改進內容。如同蘇老師建議,未來可能是以亂數決定車子起點,這樣學生就無從將地圖「寫死」在程式內,教學團隊也不再需要查「違規」,參與競賽的同學也能自由發揮設計才能,體會BFS演算法的優點 (以及其不足之處)。
最後,本學期在問題導向學習的成績,第11週的 Check Point 加上補考,共有 11 組 (超過四成) 拿到120滿分,有些小瑕疵導致沒有滿分的有13組,分數分別是 110 或 100 分,只有兩組拿到 80 這樣的分數。而第12週指定題的分數落差就很大,如圖二滿分2140,但若車子行走超過預期,時間內允許組員決定是否用手去觸碰它,每觸碰一次扣 50分。三個班26組同學,只有一組取得所有 RFID Tag 序號 (拿到所有寶藏),但因用手觸碰兩次,所以總分只有2040。六組同學總成績在 1000 到 1600 分之間,100-800分的有13組。有三組同學只拿到最近的寶藏獲得60分,也有三組同學於時間內一分都沒拿到。
在第12週課程之後,由「指定題」轉換到「自選題」,也就是由「問題導向學習」Problem-based Learning 轉換到「專題導向學習」 Project-based Learning (PjBL)。第一週上課前提供系友陳宣文業師的投影片,第二週上課前針對投影片隨堂小考,目的皆在提示學生未來畢業後,需具備那些職場基本素養。因此在課程最後的第三階段,請學生自己針對目前所學知識,自行提案剩下約五週左右的時間,想要完成什麼樣的專案。藉由同學自行提案、自行規劃同組同學角色扮演、合作時程與甘特圖,並提醒課程一開始所約定的期末展示時間,請同學在期末展示前呈現出最好的結果。
去年 (108-2學期) 25組同學在「自選題」階段,每組都會使用從沒教過的元件,作為他們期末專題的一部分;也就是必須藉由過去所學的知識,閱讀新元件的規格書,知道怎麼正確使用;也必須在網路上尋找資料,知道要如何為元件撰寫程式。舉例而言,超音波感測模組的工作原理,與紅外線感測模組接近,後者課堂有教導而前者沒有,因此使用超音波模組,幾乎不需額外花費太多時間,去年在三個班25組修課同學中,共有15組同學選用超音波模組 (15/25)。
而其他的模組可能更複雜,使用上所需跨越的門檻也更高。例如有別於 UART ( Universal Asynchronous Receiver/Transmitter) 或 RFID 模組所使用的SPI(Serial Peripheral Interface Bus);課堂上並未介紹的感測模組,如三軸加速器、九軸感測器等使用 Inter-Integrated Circuit (I2C) 介面,去年也有五組同學選用並花費較多的時間研究。
甚至有許多同學在最後幾週時間,將Arduino換成 Raspberry Pi 平台,或讓兩個平台做適當整合。Raspberry Pi 是一台以 Linux 作業系統為核心的開發版,運作在 ARM Cortex-A 系列的處理器,與 Arduino Uno 的8位元微控制器大不相同。但同學經過大半學期訓練,自學使用它更具有信心。在上學年使用它的組別共有15組,占修課組別 3/5,充分表達台大電機學生挑戰自我的本質。
但人算不如天算,本學期課程在最後幾週「自選題」階段,同組同學最需要大量密集合作討論,卻因為一場疫情而變奏,有了與以往不同的進行方式。
參、疫情發生所造成的改變
學校於5月17日公布
| 各位好:因臺北市及新北市已有多起染疫個案,且持續增加中,疫情已是警戒標準的第三階段,除校方已於5月14日發布本校各項防疫措施以茲因應外,有關教學及學生申辦業務相關因應措施,務必配合辦理:5月17日起至本學期結束 (109-2),#本校所有課程 (#含期末考) #全面採用遠距或線上方式辦理。 |
:
電機系吳忠幟主任也於5/21中午,針對所有大學部實驗/實作課,招開防疫應變線上討論會議。系上十多位複選必修實驗課的授課老師,輪流在線上會議,說明課程全面遠距的做法;各老師也一起集思廣益、互相借鏡。而本課程授課教授林坤佑老師,也代表其他授課老師,介紹本課程目前到學期末預計的處理方式。
本學期授課教授從第13週開始,三班上課時間皆以U-Meeting線上教學,三個小時的課程規劃改為:
第一小時:各組報告指定題完結報告,每組5分鐘簡報
第二小時:介紹自選題、討論
第三小時:各組報告自選題初步發想,每組5分鐘簡報
在5/17, 5/24 這兩週透過 U-Meeting 的討論,每組同學都在線上報告自己的期末規劃,助教與教授們也給予回饋意見,同學想要實施的範圍是否太大? 甘特圖的規劃是否過於理想? 想做的專題是否可取得設備完成?…等問題。鼓勵學生創新,甚至放掉前12週所做的內容,重新考慮一個與車子無關的設計,都是這幾週的教學目標。
當疫情升溫且台北市疫情嚴重,許多同學也離開台北回到自己的家。同學學期初進行分組時,當然不會預料到這樣的情況,因此在 5/17 後各組同學討論,也只能利用網路或電話聯繫。而這是一門實驗課,同學們沒有辦法面對面討論,也沒有辦法一起做實驗解決問題,而老師們對這門課的基本要求,不會因為疫情而有多大的改變;導致每週課程線上討論時,都感受到同學的焦慮,工作紀錄簿上也有著相同的反映,這段時間對修課學生、助教、教授們都是考驗。
在自選題器材選用的前幾週,每組同學都需規畫好,各組到 6/30 期末展示的題目、時程規劃等內容。但麻煩在於有些同學已離開台北,或指定題組裝好的車輛留在宿舍,在疫情警戒且學校宣布線上授課的同時,教授們一致不希望學生因這門課回到學校,即使只是回宿舍拿車。因此在實務上有了變更的作法,並公布給學生:
自選題進行請避免群聚,以遠端方式進行軟硬體整合合作。n 主題以軟體設計與創新為主,不以有沒有車子作為評分標準。
材料管理與硬體實作,建議由一個人負責。
提供實驗室現有硬體列表供各組勾選,請各組提供收件人資料,助教將以郵寄送達。
其他所需硬體請利用網路商店進行採購,每組總預算在台幣 1500 以內。
採購請索取發票並開台大統編,單據請先自行保存,待疫情緩和再進行報支。
由於突如其來的轉變,學生們對期末規畫也有所轉變,硬體需求登記表單如圖三;可先交給一人處理另兩位同學線上方式協助;也可是分工做實驗,最後再一起快遞給同一個人彙整。實驗的進行增加了許多困難,卻也增加了許多有趣的地方。5月底左右學生們已大致確定自選題方向,也規劃好所需零件;兩位大助教偕同助教群,統整三個班一共26組組員所需,如圖四。6月初由郵局寄出。
肆、期末自選題規劃與展示
在疫情嚴峻的情況下,許多相對應的軟體蓬勃發展,呂英弘助教曾規劃6/30的期末專題,於 Gather town 網路平台展開,如圖五。國內外有許多會議就以此安排,讓每個參與者都可以連到此虛擬平台,模擬真實環境進行。但幾位參與測試的老師,皆擔心期末展示占總成績20%,並且連線人數將近百人,如在使用經驗與測試皆不足的情況下貿然使用,可能會影響成績造成學生困擾。因此本學期最後仍使用U-Meeting,於線上進行期末自選題展示。兩位大助教依「教師」、「助教」、「學生」提供三個版本的「期末自選題時程說明」,於109/6/30(三)開始,整體安排時間為13:00-16:20,
一、12:30~12:40 會議預備階段(共10分鐘)
這階段三個班的三位老師配合指定助教,於這段時間分別在網路上開設三個會議視窗,並且使用 U-Meeting 分組討論功能,開設不同討論組別。
二、12:40~13:00 設備測試階段(共20分鐘)
所有評審教師、助教、學生於此階段上線,確認連線狀況正常,學生可正常進入各小組。修課同學需在這小組內測試自己連線情況,有任何問題也需要於此階段排除,否則影響期末評分。而助教為機動人力,負責協調與解決問題。
三、13:00~14:10 海選評審階段(共70分鐘)
評審教師依時程表,如圖六亮黃色規劃,於指定時段在規劃的組別,進入對應的小組會議室進行評分,等到評分教授都到齊小組就開始報告。教師每評審完一組後需於緩衝時間內,在網路上填寫該組的評分表單,並移動至下一組評分,最後送出所有組別的評分結果。會議主持助教需對學生報告時間、教師提問時間做掌控與提醒,其餘助教皆為機動人力協助排除問題。
四、14:10~15:00 評分票選階段(共50分鐘)
所有組別評分完成後,評審教師於這時間內,進入選拔特色獎之 U-Meeting 會議室中,參與特色獎選拔。在十位評審老師之中,八位評審老師評八組,兩位老師評七組,以確保26組同學,每組都有三位評審評分,且授課老師不對自己的班級做評分。
如圖六所示,這段時間大助教一方面統計評分結果,評審老師也可看到其他老師的評分。由於該班的兩位授課老師,在過去幾週參與學生的課堂討論,大致都能夠掌握學生的表現,如有評審給分特別低,也可從授課教師這得到證實,是否該組學生真的比較不夠認真。
由於表現優秀的同學成績都非常接近,最後老師們一致決議本學期給出八組特色獎。各班的三位助教選出助教獎,助教獎不與特色獎重複,而是各班助教一致認為,該班即使沒獲得特色獎,但表現仍非常傑出的組別。人氣獎則由所有與課同學,共同選出心中覺得最好的組別。
五、15:00~16:20 頒獎階段 (共80分鐘)
最後所有評審教師、所有助教與學生,都在這時間移到成果發表會議連結,並公開公布所有評審結果。獲得特色獎的組別,會有一位教授簡短介紹該組特色,並讓該組於5-6分鐘內,快速簡報且播放展示影片。特色獎宣布且簡報完成後,各班助教公布獲得助教獎的小組,並使用兩分鐘左右說明該組獲獎理由,最後大助教公布人氣獎得主。
實際上期末專題執行如上述規劃,本學期這門課於 6/30 16:44 完美結束。
伍、得獎作品概述
本學期26組同學如同去年25組同學,每組都使用新元件設計期末自選題內容。今年有11組同學自學Raspberry Pi並整合Arduino,4組同學使用Arduino Nano。雖然Raspberry Pi的使用比例較去年少,但今年有幾組對於Raspberry Pi有更深入的應用,最後分別描述即使在疫情中,同學們發揮創意獲獎的作品。
特色獎八名。
戴歐尼修斯是希臘神話的酒神,也有著快樂的象徵;而週一班第七組的拍手機器人如圖七,以此為命名。疫情階段人與人需保持距離,讓人們有很大的心理壓力;該組同學使用面板顯示鼓勵的話,馬達帶動機械控制像鼓棒的兩隻手,拍手時周圍的光線也跟著亮起,達成隨節奏或音樂拍手的目的。
在搭乘高鐵的途中,都會有員工在走道上拖小垃圾桶收垃圾,週三班下午第七組因為疫情,造成無法使用原有的車子。但他們整合指定題的概念,搭配其他感應模組與影像串流裝置,在短時間內重新採購材料,設計一台完全不同的移動垃圾桶,並成功展示設計的許多功能如圖八。
疫情期間大家都關在家,採購大都只能網購,因此物流業供不應求,倉儲系統無人化為未來趨勢,週三下午班第一組設計了利用顏色辨識,作為貨物分類的自動化倉儲搬運車。如圖九所示,車輛利用 Raspberry Pi 搭配 Pi Camera,自動尋找不同顏色方塊所在位置,使用 Arduino Uno搭配伺服馬達控制夾具夾取,放置指定的顏色位置 (如同倉儲標記)。
週三下午班第四組的成員有兩位養貓,卻因為課業忙碌較沒時間陪伴,延續指定題發想了自動逗貓車。該組成員平常使用 Google Meet 合作討論,最後呈現 Android 系統上的 APP ,可以透過藍芽與 Raspberry Pi連結,提供照相、播放音樂、超音波測距等功能,並回傳照片在APP顯示;Arduino Uno 則提供車輛移動,轉動逗貓棒等功能,整體逗貓過程的截圖如圖十。
車輛在城市中尋找停車位很困難,週三上午班第五組提出新的車輛設計,搭配數個會旋轉的超音波模組,對周圍環境進行偵測,使得車子具備避障、自駕與自動尋找停車位的功能。使用一個 Arduino Uno 兩個 Arduino Nano 模組,考慮車子的迴轉半徑,與多個超音波模組整體判斷結果,讓車子具備倒車入庫、路邊停車等功能,如圖十一所示。
在疫情嚴峻下消毒,清潔人員噴灑消毒液的同時,本身也增加吸入消毒液的風險。因此週三下午班第九組設計可遙控的防疫消毒車。設計手機 APP 遙控消毒車,此APP也具備搖桿功能,方便利用支架控制噴頭。車上的保鮮盒裝載酒精類的消毒液,再利用抽水馬達供應噴嘴,最後的呈現如圖十二所示。
週三上午班第六組利用大量雷切材料,完成升降運輸車設計;主要是希望疫情期間,人不離開位置也可傳遞資料,如工廠的自動化系統。整體機構設計利用 AutoCAD, Fusion360 等軟體,使用 Raspberry Pi 搭配超音波模組測距,伺服馬達轉動升降高度,Pi Camera 處理影像,並透過 I2C 與 SPI 介面,讓 Arduino 模組與 Raspberry Pi 溝通。最後成果影片如圖十三所示。
疫情期間在市場與賣場都出現人群的狀況,週一上午班第二組設計了防疫小尖兵,透過超音波模組算出兩個人的距離,熱成像模組取得對應角度,搭配餘弦定理得知這兩人是否保持距離。口罩辨識使用 Pi Camera 錄影,利用網路上取得臉部與口罩辨識模型訓練,最後再搭配深度學習套件判斷是否有戴口罩,最後結果影片截圖如圖十四呈現。
助教獎每班各一名。
週一班第三組利用類似掃地機器人技術,讓這輛車在室內行走後,直接畫出室內環境的二維平面圖,尤其對於故意設置的障礙物,幾何形狀與位置都非常清楚。週三上午班第一組在原車輛上搭配了Raspberry Pi 模組,同時也撰寫APP遙控取景與酒精噴灑及夾物裝置,形成防疫運輸車。而旁聽生的週三下午班第六組,利用感測元件設計非接觸式自動販賣機,販賣機的外觀、怎麼讓飲料掉出來,都有很多軟硬體整合的巧思在其中。
人氣獎 (所有同學投票)
週三上午班第六組與下午班第四組同票獲得,這兩組也是特色獎得主。
陸、結論
限大一新鮮人的「電資工程入門設計與實作」,今年邁入第四年,同學們給它可愛的暱稱是 「車車課」。去年與今年擔任助教的學生,有多位是當年「車車課」的第一屆學生,也是今年六月畢業的學生,他們分別扮演過學生與助教的腳色,不只一位反映這是一門老師累、助教累、學生也累的課程,但卻能幫助修課學生,學習到軟硬體整合與系統的概念,對大學生活有著完全不同的影響。而今年,授課教授不因疫情嚴峻對課程要求有所鬆懈,修課同學不因疫情而怠惰或失去創意,期末自選題反倒是從疫情獲得了許多靈感,也發展了即使遠距也可合作的新模式。最後的合照如,右上角顯示與會者 94人,共同完成這部疫情下的變奏曲。
| 週次 | 課程內容 |
| Week 1 | 課程介紹、課程提醒事項、Arduino IDE |
| Week 2 | 228補假統一停課 |
| Week 3 | Arduino |
| Week 4 | Introduction to search algorithm(s) |
| Week 5 | 車子組裝 |
| Week 6 | 循跡 P control |
| Week 7 | 溫書假統一停課 |
| Week 8 | 指定專題介紹:循跡自走車迷宮尋寶 |
| Week 9 | 期中考週統一停課 |
| Week 10 | 指定專題上台進度報告 |
| Week 11 | 指定專題檢查點 (Check Point),設計補教教學。 |
| Week 12 | 指定專題展示、競賽 |
| Week 13 | 自選專題介紹,自選題 Proposal 討論 |
| Week 14 | 指定專題補考,自選題 Proposal 確認 |
| Week 15 | 自選專題設計、製作與進度報告 + 指定專題補考、展示 |
| Week 16 | 自選專題設計、製作與進度報告 |
| Week 17 | 端午節統一停課 |
| Week 18 | 期末考週統一停課,加開Open Lab時段 |
| Week 19 | 自選專題展示與競賽,三班統一時間:6/30 (三)13:00~17:00 |
表一、 109-2電資工程入門設計與實作的課程大綱
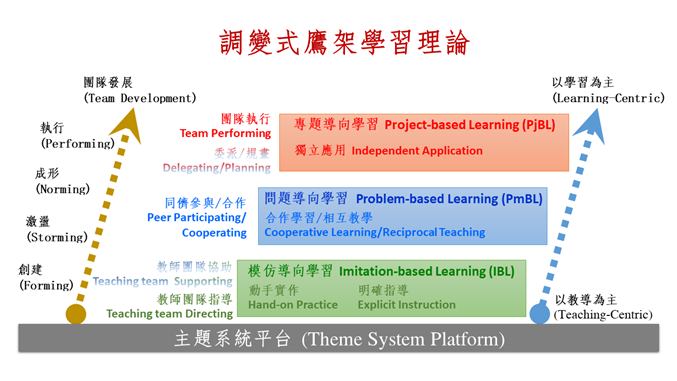
圖一、依教學理論規劃三階段課程
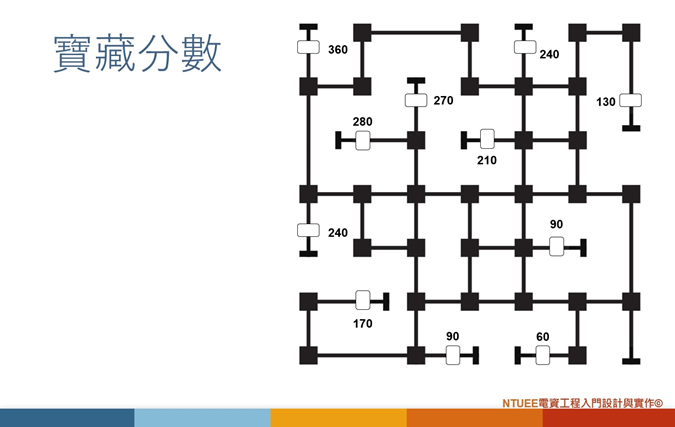
圖二、迷宮地圖與寶藏分數
圖三、料件統計資料

圖四、統計各組需求後,準備將元件寄送給學生的大助教
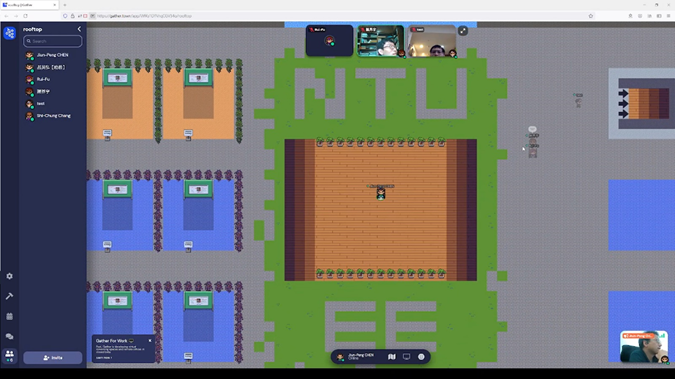
圖五、線上測試期末專題展示
圖六、教師評分統計表

圖七、週一早上班第七組,拍手機器人
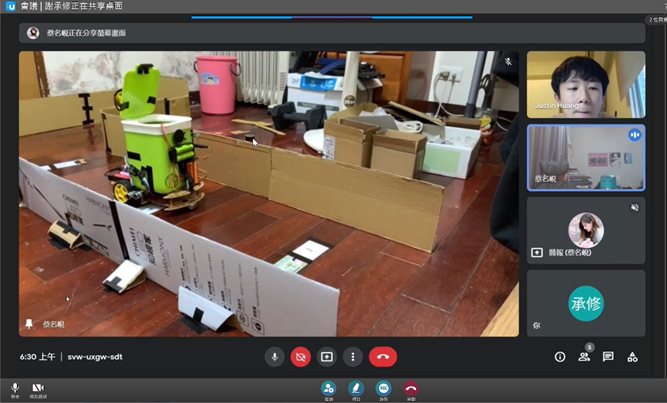
圖八、週三下午班第七組,移動垃圾桶
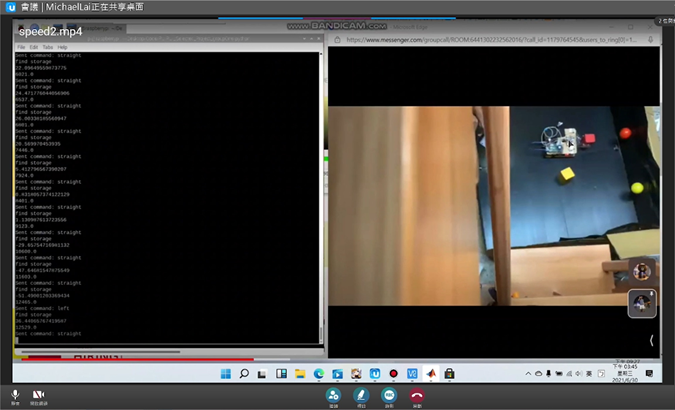
圖九、週三下午班第一組,自動化倉儲車
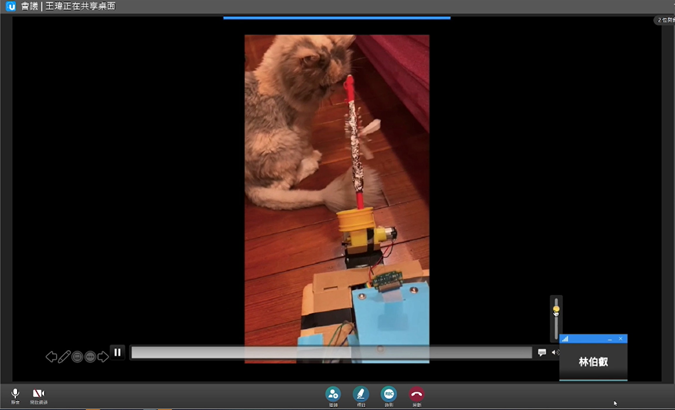
圖十、週三下午班第四組,自動逗貓車
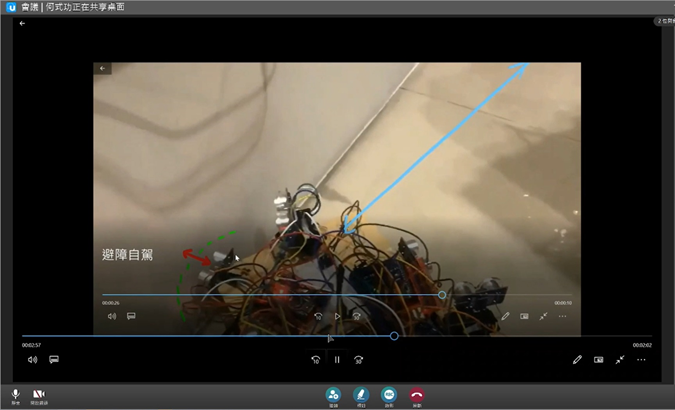
圖十一、週三早上班第五組,自動避障車
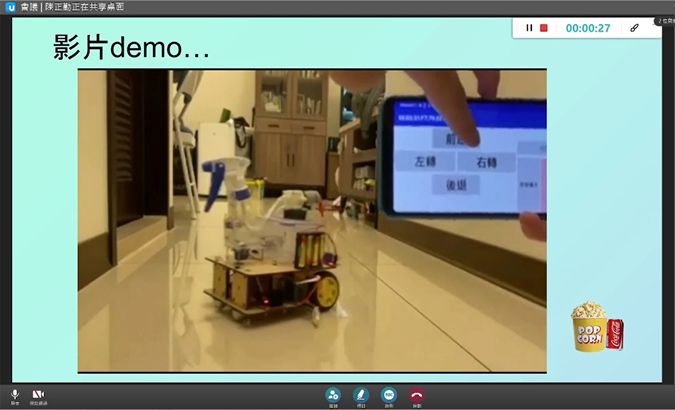
圖十二、週三下午班第九組,防疫消毒車
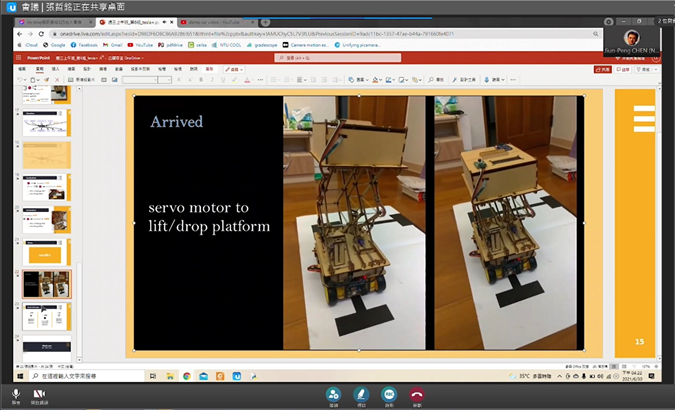
圖十三、週三上午班第六組,升降運輸車
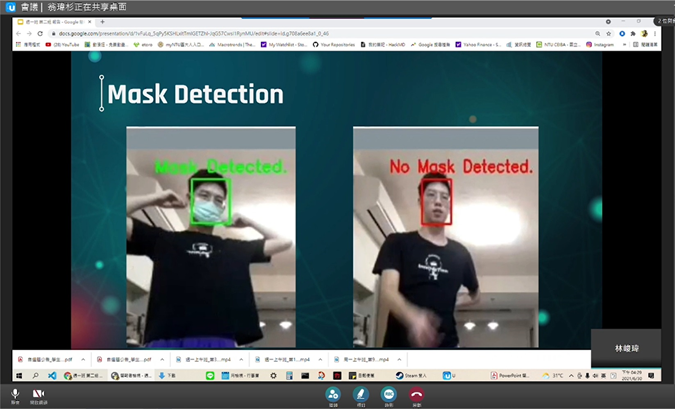
圖十四、週一上午班第二組,防疫小尖兵

圖十五、學期結束團體合照